



【交付案例】复旦大学附属中学多智能体协同控制平台
复旦大学附属中学为开展多智能体协同控制前沿研究,拟建一套“空-地”一体集群开发平台。平台集成亚厘米级室内定位、无人机与无人车异构节点,支持Matlab/Simulink图形化建模与代码自动生成,实现算法快速验证,满足教学、科研及竞赛创新需求。
01
项目背景
·需求单位:复旦大学附属中学
·采购目的:需要一套多智能体集群控制开发平台,进行控制算法的开发和研究
·硬件需求:高精度室内定位系统+无人机+无人车
·软件需求:需要基于matlab+simulink进行算法开发
02
交付视频:
03
功能说明:

软件框架
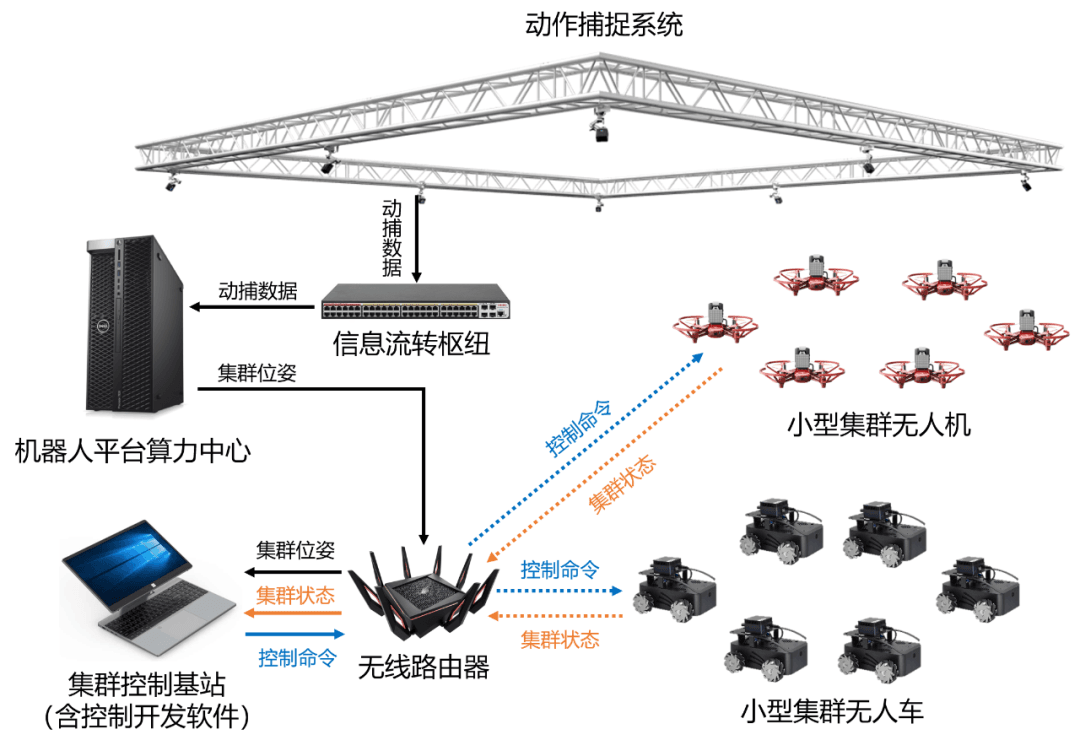
硬件框架
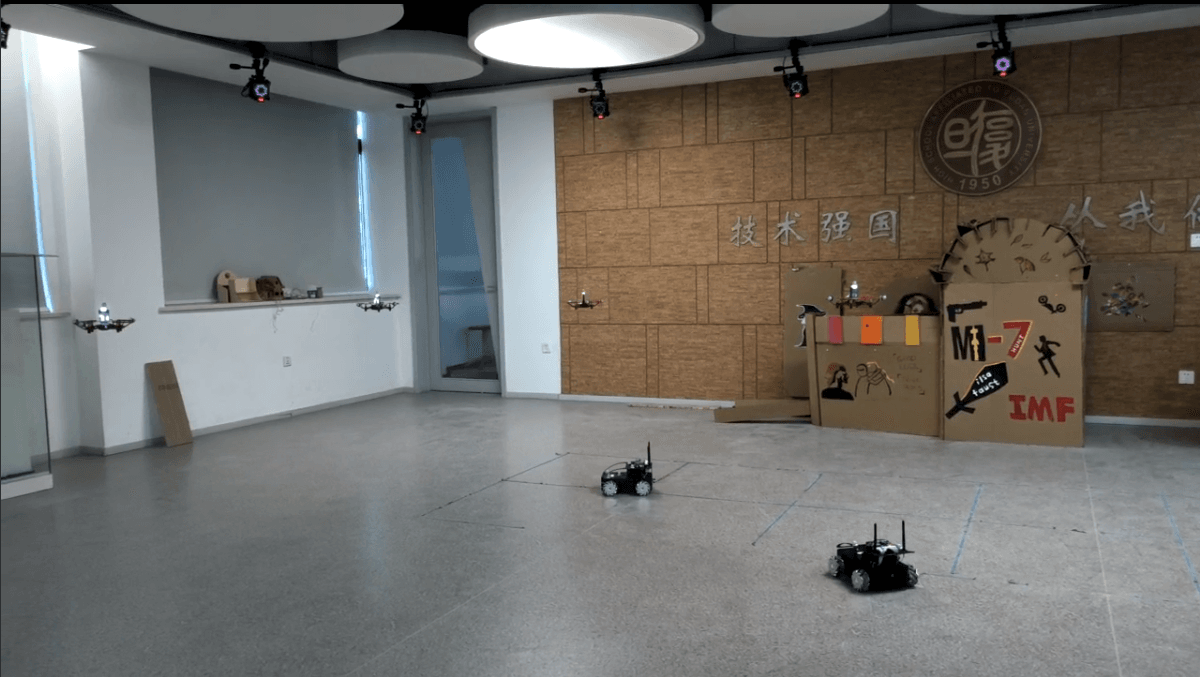
·“智群·RMTT”是一套基于无人机和无人车的室内多智能体集群编队实验平台,配套丰富的二次开发例程和简洁的集群控制地面站,支持集群控制、路径规划、目标识别、任务决策等教学任务和算法验证。
·实验平台基于高精度光学动作捕捉系统,能够在室内实时获得多智能体的三维空间位姿,实现了多智能体的闭环稳定控制。小型化的无人机和无人车平台安全可靠且基于ROS可互通互联,适合进行集群类算法的教学和开发验证。
·集群控制地面站可同时接入所有智能体,能够实时读取位置、速度和视频流等状态,支持单体/集群控制指令的下达。
·配套专为Matlab用户设计的开发工具包。通过建立Matlab/Simulink与无人机底层系统之间的高效通信链路,研究人员无需将Simulink模型手动转换为C/C++代码,即可在同一个开发环境中完成算法设计、仿真测试以及真机验证。这种一体化的工作流程,显著降低了算法移植的技术门槛,缩短了从理论验证到实际飞行的周期。
概览
复旦大学附属中学为开展多智能体协同控制前沿研究,拟建一套“空-地”一体集群开发平台。平台集成亚厘米级室内定位、无人机与无人车异构节点,支持Matlab/Simulink图形化建模与代码自动生成,实现算法快速验证,满足教学、科研及竞赛创新需求。
相关产品

智群·RMTT
室内多智能体集群编队实验平台

智群·RMTT
室内多智能体集群编队实验平台
基于光学动作捕捉技术的室内多智能体实验平台,支持无人机和无人车集群编队,提供完整的ROS开发接口和教学例程