






Sunray-150科研无人机
专为科研设计的无人机实验平台
基于Sunray开源项目的科研无人机,提供简单易用的二次开发接口和丰富的demo教学例程,支持多种传感器配置
了解详情
查看产品 →

公众号
扫码关注

客服小C
扫码联系

客服小K
扫码联系
数据回溯,图形化编程,半实物仿真系统
公众号
扫码关注
客服小C
扫码联系
客服小K
扫码联系
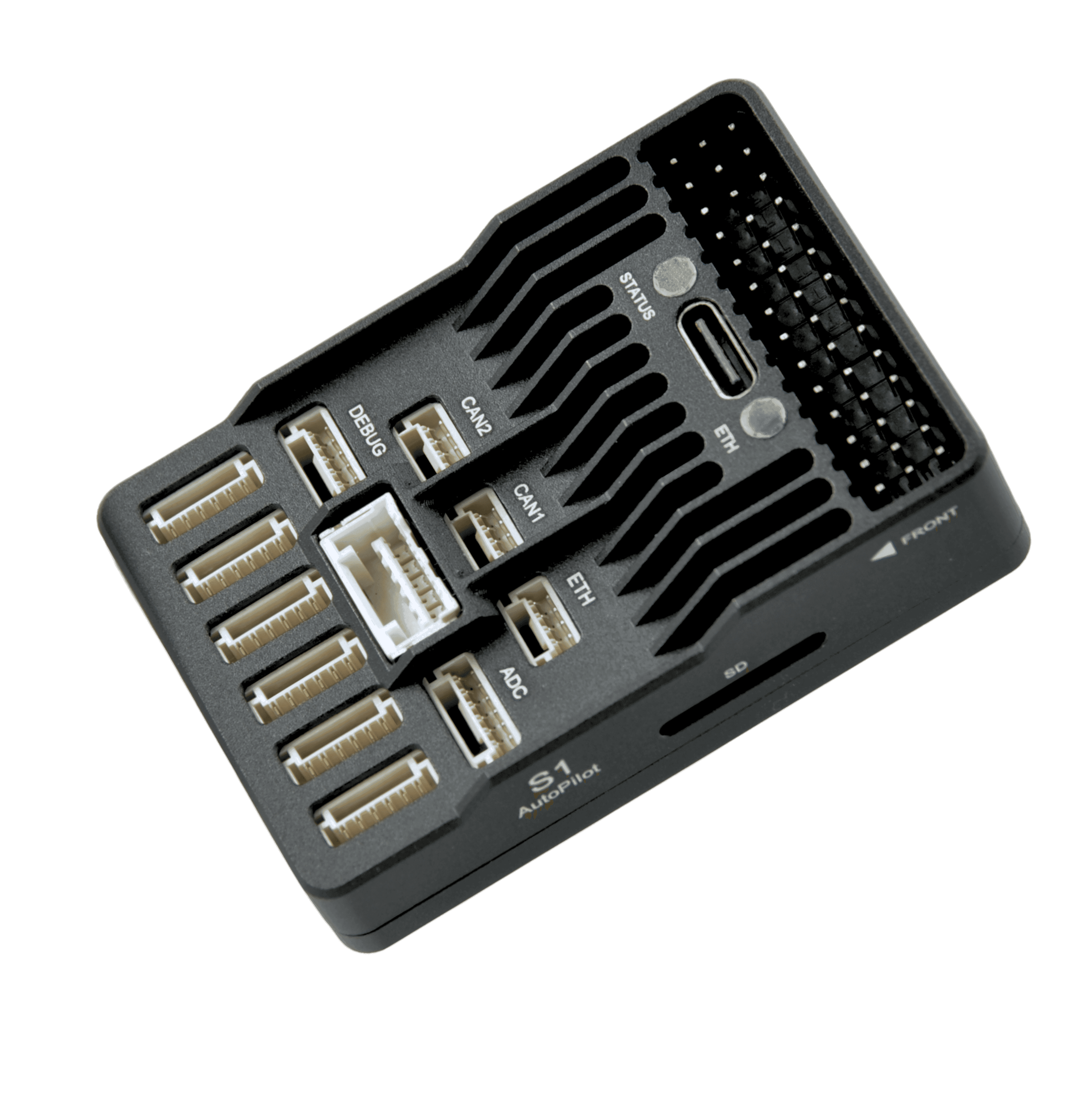
| 主处理器 | STM32H743 ARM®Cortex®-M7 480MHz 2MB Flash |
| 加速计 | BMIO88/ICM-42688 |
| 陀螺仪 | BMIO88/ICM-42688 |
| 电子罗盘 | BMM150 |
| 气压计 | SPL06 |
| USART串口 | 6 |
| I2C | 3 |
| SPI | 1 |
| PWM | 16路输出(12+4) |
| RC IN | 1,支持PPM/SBUS |
| RSSI输入 | 1 |
| CAN标准总线 | 2 |
| Power输入 | 1 |
| GPS | 2 |
| ADC | 1 |
| Debug | 1 |
| USB接口 | TYPE C |
| ETH以太网 | 1 |
| 尺寸 | 56×37×13mm |
| 重量 | 40.5g |
| FMT固件 | 多旋翼/固定翼/Vtol垂起/无人车/无人船 |
| 输入电压 | 10-57.6V(2-12S) |
| 输出电压 | 5.3V/2A |
| 最大测量电流 | 100A |
| 测量精度 | ±0.2V/0.5A |
| 分压系数 | 21.0 |
| 安培每伏 | 33.33 |
| 接口 | XT60/GH1.25 6Pin |
| 重量 | 37g |
获取 SIEON-S1开源智驾仪 的技术文档、资料和相关软件
文档整理中,敬请期待
软件包准备中,敬请期待
固件发布中,敬请期待
探索与 SIEON-S1开源智驾仪 相关的其他产品,构建完整的解决方案
专为科研设计的无人机实验平台
基于Sunray开源项目的科研无人机,提供简单易用的二次开发接口和丰富的demo教学例程,支持多种传感器配置

单体控制、双目视觉定位、深度图避障以及目标检测等
基于Sunray开源项目,提供丰富的demo例程,涵盖单体控制、双目视觉定位、深度图避障以及目标检测等多个无人机及机器视觉相关研究方向,为无人机科研开发助力。

涵盖单体控制、双目视觉定位、深度图避障以及目标检测
基于Sunray开源项目,提供丰富的demo例程,涵盖单体控制、双目视觉定位、深度图避障以及目标检测等多个无人机及机器视觉相关研究方向